 Germany
Germany Italy
Italy USA
USA South Korea
South Korea UK
UK India
India France
France China
China Japan
Japan

Seit 1988 - CGTech steht für Erfahrung, Tradition
und zukunftssichere Technologien
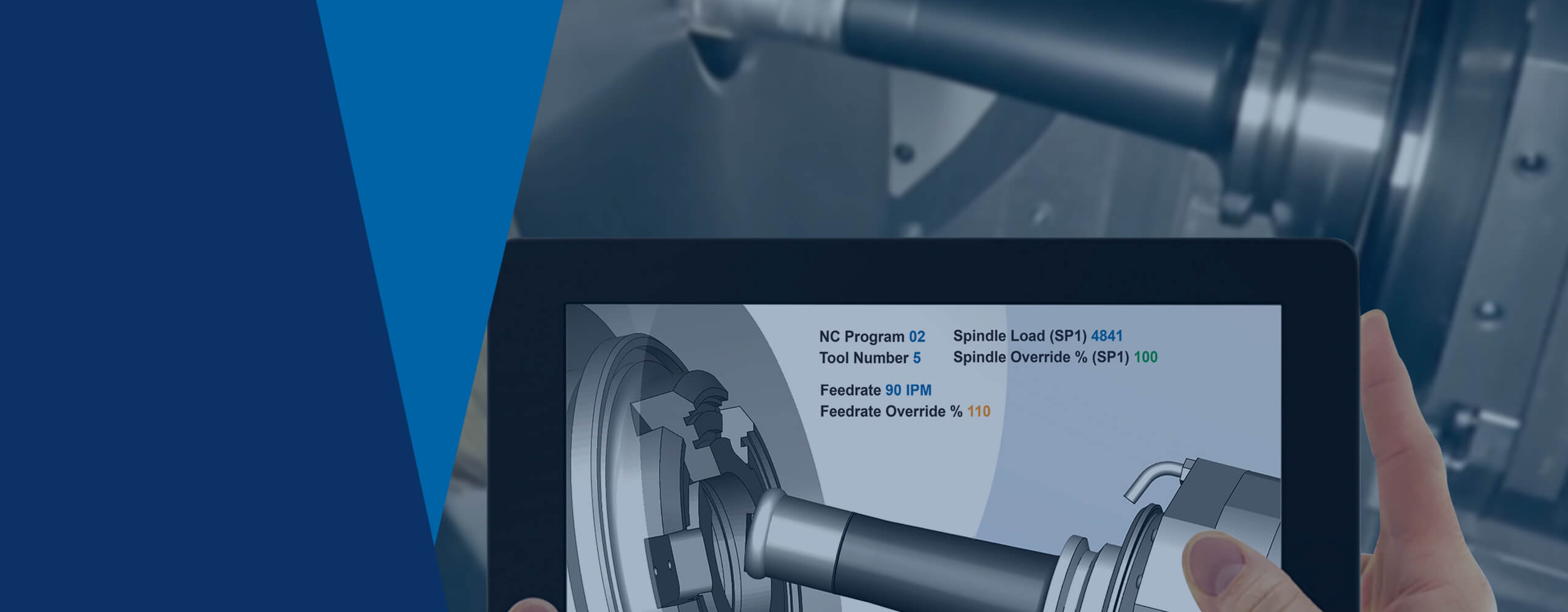
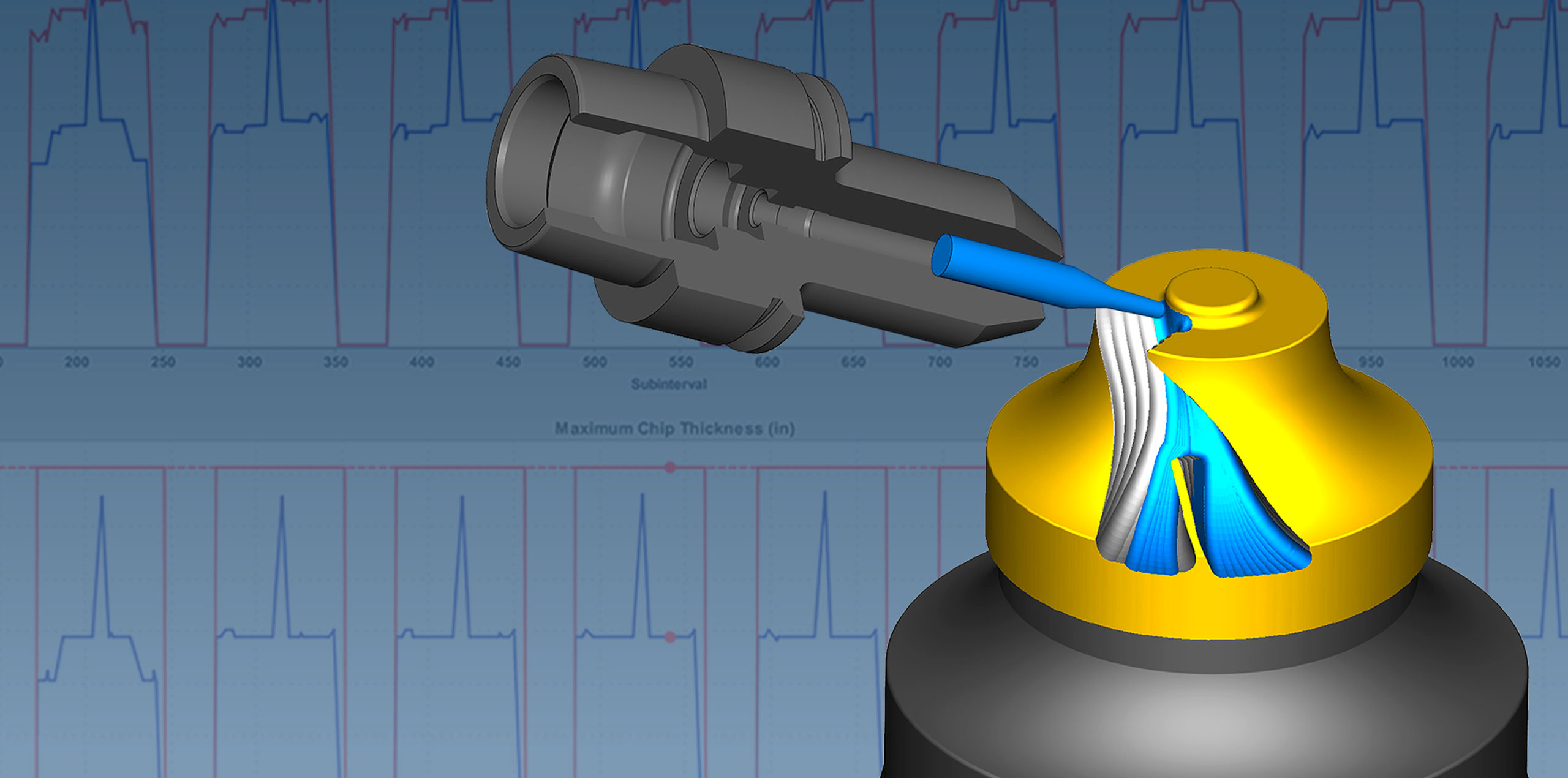
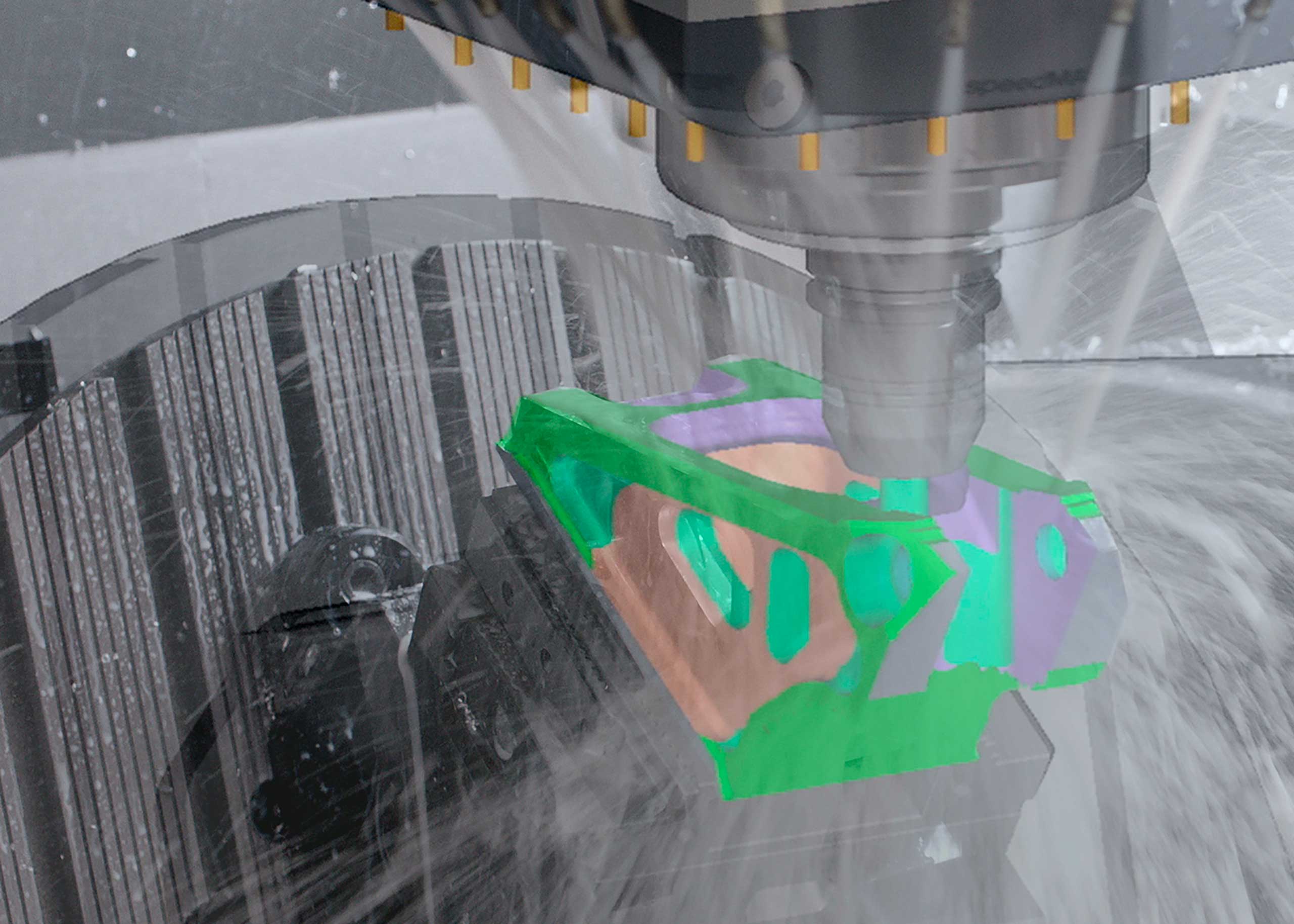
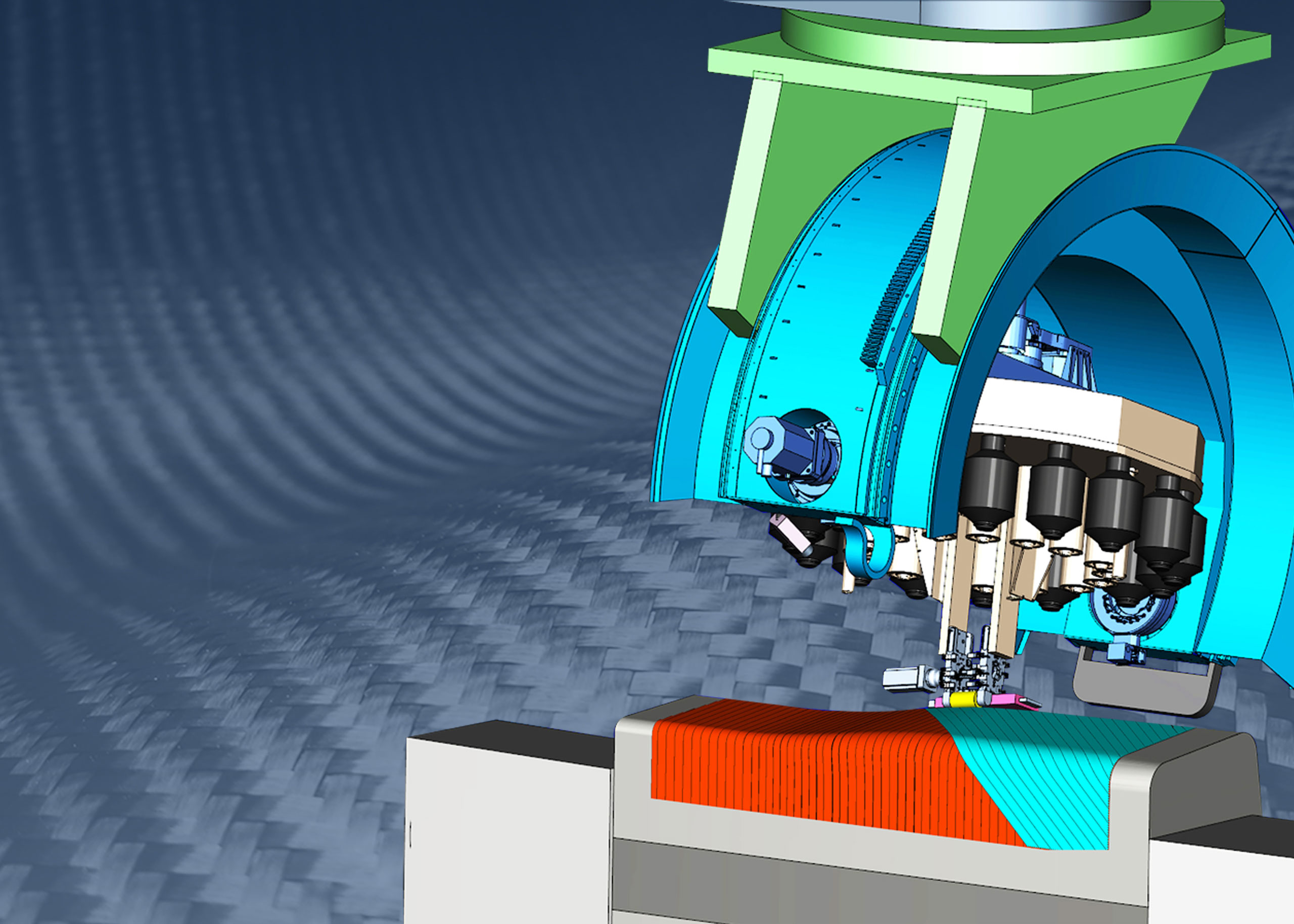
Seit 1988 ist CGTech mit VERICUT der weltweite Marktführer im Bereich NC-Code Simulation. Wir bieten ein breites Angebot an Produkten und Lösungen für ihre CNC Maschinen, um Kollisionsfrei und effizienter zu fertigen. Wir arbeiten eng mit unseren Kunden und Partnern auf der ganzen Welt zusammen, um ihre Bedürfnisse zu verstehen und geeignete technische und wirtschaftliche Lösungen durch den Einsatz fortschrittlicher Technologien anzubieten.









Produkte
Media & Presse
Service & Support
Unternehmen


